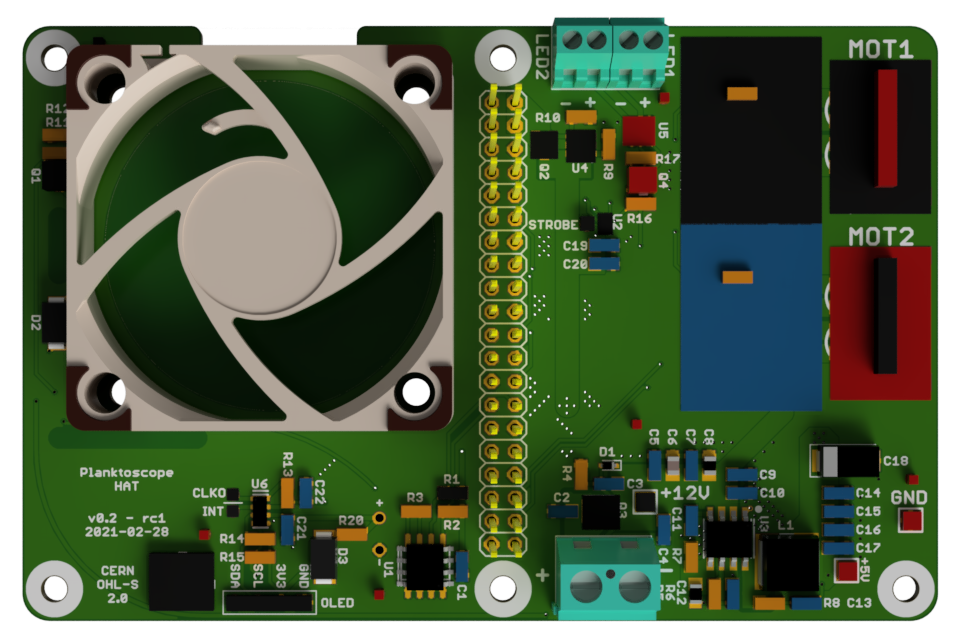
PlanktoScope Hat Hardware🔗
Buses and GPIO pinout🔗
I2C1 Bus🔗
RTC RV-3028-C7🔗
Address 0x52
Note
The schematic does include the RTC RV-3028 but due to a lack of software support; it was removed in production at Fairscope. Some PlanktoScope hat units may have it but that is currently unsupported. The PlanktoScope v3 will have complete RTC support.
OLED Display🔗
Address 0x3c
LED control: LM36011🔗
Address 0x64 Control through specific software, current range from 0 to 376mA in normal mode, up to 1.5A in flash mode.
SPI0 Bus🔗
Motor Controller 0: TMC5160🔗
Chip Enable: SPI0_CE0 Motor Enable: GPIO23
Diagnostic output: GPIO16 for Error output GPIO20 for Stall output
Motor Controller 1: TMC5160🔗
Chip Enable: SPI0_CE1 Motor Enable: GPIO5
Diagnostic output: GPIO16 for Error output GPIO20 for Stall output
GPIO🔗
Fan control🔗
PWM1 control through GPIO13
LED Output selection🔗
GPIO18: high for LED1, low for LED2
LED Strobe🔗
GPIO22 for pulse
I2C0 Bus🔗
EEPROM M24C32🔗
Address 0x50 For HAT information only.